Coordinate Estimation
Описание проекта Разработка автоматической системы нахождения людей с определением географических координат в зоне поиска с применением алгоритмов искусственного интеллекта и БПЛА
Описание проекта
Разработка автоматической системы нахождения людей с определением географических координат в зоне поиска с применением алгоритмов искусственного интеллекта и БПЛА.
Планирование маршрута и облет:
- Формирование полетного задания
- Загрузка на БВС
- Запуск БВС и облет
Выгрузка данных и распознавание:
- Выгрузка данных из БВС
- Распознавание объектов
- Расчет геопозиций объектов
- Привязка снимков к объектам
- Анализ уникальности объектов
- Отрисовка геопозиций объектов
Результат работы:
- Список уникальных объектов с координатами и привязанными снимками
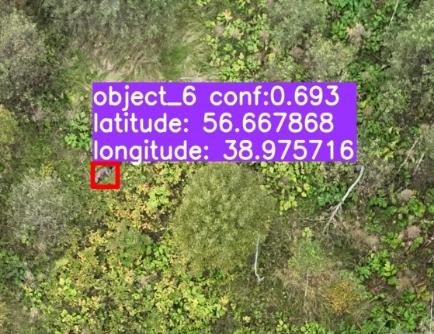
- Изображения с отрисованными координатами
Бизнес-задача
Разработка автоматической системы нахождения людей с определением географических координат в зоне поиска с применением алгоритмов искусственного интеллекта на базе беспилотного воздушного средства (БВС)
Постановка ML Задачи
Разработать детектор людей в лесной местности на основе фотографий полученных при помощи дрона.
Требования:
- False Discovery Rate не выше 0.3
- Recall выше 0.8
- Скорость работы не ниже 2 fps на изображении 5000х3600
Особенности:
- Целевое устройство - Nvidia 3070 laptop
- Важнее найти человека, нежели сделать ложное срабатывание
Исследование ML-задачи
Важнее найти человека, чем сделать неверное предсказание, поэтому Recall важнее Precision, при этом желательно минимизировать ложные предсказания. Решено взять оценку Fbeta со значением betta больше единицы. Fbeta представляет гармоническое взвешенное, график и формула расчета представлена на рисунках 1 и 2.

Рисунок 1 - График Fbeta
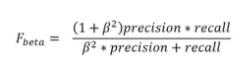
Рисунок 2 - Формула метрики Fbeta
Ускорение решения состояло из 2 этапов: ускорение модели, ускорение обработки признаков Ускорение модели через слияние операций или оптимизированный запуск слоев через TensorRT. При рассмотрении репозитория ultralytics были удалены участки кода с излишним копированием тензора и переводом между устройствами. Все операции пре/постпроцессинга перенесены на GPU.
Исследование датасета
Исходный датасет содержит порядка 8 тыс. изображений. Собран на ~ 10 сценах, из-за чего имеет низкую вариативность и большое количество одинаковых сцен, отличающихся ракурсом. Были удалены повторяющиеся сцены.
Для расширения набора данных проведен поиск аналогичных датасетов и оценка их вклада в итоговую метрику, в очищенный датасет были добавлены следующие наборы:
- LADD
- SARD
- NTUT
- Heridal
ML-модели: выбор и сравнение
Сравнивались архитектуры YOLO5x и YOLO8(m, n, x). Была выбрана модель yolov8m, результаты измерения
| model | mf1beta |
|---|---|
| yolov5x6_gigaflex_best | 0.59393 |
| yolov5x6_gigaflex_recrop | 0.59187 |
| yolov5x6_default_best | 0.61765 |
| yolov5x6_ourdata_best | 0.58019 |
| yolov8m_newdata_p2_best | 0.53826 |
| yolov8m_newdata_best | 0.54703 |
| yolov8m_our_sat2 | 0.54162 |
| yolov8m_our_SOTA | 0,54817 |
| yolov8m_our_SOTA_2560 | 0.57082 |
| yolov8m_our_SOTA_2560_85epoch | 0.56764 |
| yolov8x_60epoch | 0.57693 |
| yolov8s_80epoch | 0.55670 |
| yolov8m_gf_config | 0.42103 |
Оценка результата
Модель нейронной сети удовлетворяет требуемым метрикам качества, также. Ускоренное решение удовлетворяет требованию к скорости инференса модели. Был проведен анализ и чистка датасета со смешением с данных из открытых источников.
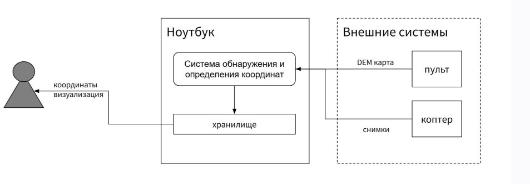
Архитектура решения
Решение состоит из взаимодействия между собой систем обнаружения, располагающейся на пульте, пульта с планировщиком маршрута и картами высот и коптера, осуществляющего снимки и запись географических координат.
Демонстрация решения
Заключение
В ходе соревнования по обнаружению людей UP Great Emergency Search наша команда заняла второе место в финальном сателите, 5 место в сателите 2.
Авторы проекта
Студенты группы М8О-206М-22:
- Егор Лыгин
- Кирилл Сыроежкин
- Михаил Мошков
- Михаил Пилюгин
- Дмитрий Коростелев
No comments yet. Login to start a new discussion Start a new discussion